36. Optimal Growth II: Time Iteration#
Contents
36.1. Overview#
In this lecture we’ll continue our earlier study of the stochastic optimal growth model.
In that lecture we solved the associated discounted dynamic programming problem using value function iteration.
The beauty of this technique is its broad applicability.
With numerical problems, however, we can often attain higher efficiency in specific applications by deriving methods that are carefully tailored to the application at hand.
The stochastic optimal growth model has plenty of structure to exploit for this purpose, especially when we adopt some concavity and smoothness assumptions over primitives.
We’ll use this structure to obtain an Euler equation based method that’s more efficient than value function iteration for this and some other closely related applications.
In a subsequent lecture we’ll see that the numerical implementation part of the Euler equation method can be further adjusted to obtain even more efficiency.
36.2. The Euler Equation#
Let’s take the model set out in the stochastic growth model lecture and add the assumptions that
\(u\) and \(f\) are continuously differentiable and strictly concave
\(f(0) = 0\)
\(\lim_{c \to 0} u'(c) = \infty\) and \(\lim_{c \to \infty} u'(c) = 0\)
\(\lim_{k \to 0} f'(k) = \infty\) and \(\lim_{k \to \infty} f'(k) = 0\)
The last two conditions are usually called Inada conditions.
Recall the Bellman equation
Let the optimal consumption policy be denoted by \(c^*\).
We know that \(c^*\) is a \(v^*\) greedy policy, so that \(c^*(y)\) is the maximizer in (36.1).
The conditions above imply that
\(c^*\) is the unique optimal policy for the stochastic optimal growth model
the optimal policy is continuous, strictly increasing and also interior, in the sense that \(0 < c^*(y) < y\) for all strictly positive \(y\), and
the value function is strictly concave and continuously differentiable, with
The last result is called the envelope condition due to its relationship with the envelope theorem.
To see why (36.2) might be valid, write the Bellman equation in the equivalent form
differentiate naively with respect to \(y\), and then evaluate at the optimum.
Section 12.1 of EDTC contains full proofs of these results, and closely related discussions can be found in many other texts.
Differentiability of the value function and iteriority of the optimal policy imply that optimal consumption satisfies the first order condition associated with (36.1), which is
Combining (36.2) and the first-order condition (36.3) gives the famous Euler equation
We can think of the Euler equation as a functional equation
over interior consumption policies \(\sigma\), one solution of which is the optimal policy \(c^*\).
Our aim is to solve the functional equation (36.5) and hence obtain \(c^*\).
36.2.1. The Coleman Operator#
Recall the Bellman operator
Just as we introduced the Bellman operator to solve the Bellman equation, we will now introduce an operator over policies to help us solve the Euler equation.
This operator \(K\) will act on the set of all \(\sigma \in \Sigma\) that are continuous, strictly increasing and interior (i.e., \(0 < \sigma(y) < y\) for all strictly positive \(y\)).
Henceforth we denote this set of policies by \(\mathscr P\)
The operator \(K\) takes as its argument a \(\sigma \in \mathscr P\) and
returns a new function \(K\sigma\), where \(K\sigma(y)\) is the \(c \in (0, y)\) that solves
We call this operator the Coleman operator to acknowledge the work of [Col90] (although many people have studied this and other closely related iterative techniques).
In essence, \(K\sigma\) is the consumption policy that the Euler equation tells you to choose today when your future consumption policy is \(\sigma\).
The important thing to note about \(K\) is that, by construction, its fixed points coincide with solutions to the functional equation (36.5).
In particular, the optimal policy \(c^*\) is a fixed point.
Indeed, for fixed \(y\), the value \(Kc^*(y)\) is the \(c\) that solves
In view of the Euler equation, this is exactly \(c^*(y)\).
36.2.2. Is the Coleman Operator Well Defined?#
In particular, is there always a unique \(c \in (0, y)\) that solves (36.7)?
The answer is yes, under our assumptions.
For any \(\sigma \in \mathscr P\), the right side of (36.7)
is continuous and strictly increasing in \(c\) on \((0, y)\)
diverges to \(+\infty\) as \(c \uparrow y\)
The left side of (36.7)
is continuous and strictly decreasing in \(c\) on \((0, y)\)
diverges to \(+\infty\) as \(c \downarrow 0\)
Sketching these curves and using the information above will convince you that they cross exactly once as \(c\) ranges over \((0, y)\).
With a bit more analysis, one can show in addition that \(K \sigma \in \mathscr P\) whenever \(\sigma \in \mathscr P\).
36.3. Comparison with Value Function Iteration#
How does Euler equation time iteration compare with value function iteration?
Both can be used to compute the optimal policy, but is one faster or more accurate?
There are two parts to this story.
First, on a theoretical level, the two methods are essentially isomorphic.
In particular, they converge at the same rate.
We’ll prove this in just a moment.
The other side to the story is the speed of the numerical implementation.
It turns out that, once we actually implement these two routines, time iteration is faster and more accurate than value function iteration.
36.3.1. Equivalent Dynamics#
Let’s talk about the theory first.
To explain the connection between the two algorithms, it helps to understand the notion of equivalent dynamics.
(This concept is very helpful in many other contexts as well).
Suppose that we have a function \(g \colon X \to X\) where \(X\) is a given set.
The pair \((X, g)\) is sometimes called a dynamical system and we associate it with trajectories of the form
Equivalently, \(x_t = g^t(x_0)\), where \(g\) is the \(t\)-th composition of \(g\) with itself.
Here’s the picture

Now let another function \(h \colon Y \to Y\) where \(Y\) is another set.
Suppose further that
there exists a bijection \(\tau\) from \(X\) to \(Y\)
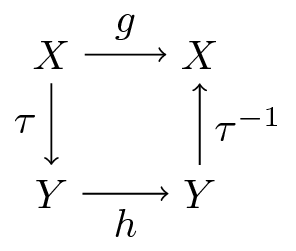
the two functions commute under \(\tau\), which is to say that \(\tau(g(x)) = h (\tau(x))\) for all \(x \in X\)
The last statement can be written more simply as
or, by applying \(\tau^{-1}\) to both sides
Here’s a commutative diagram that illustrates
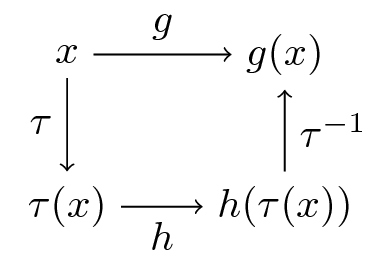
Here’s a similar figure that traces out the action of the maps on a point \(x \in X\)
Now, it’s easy to check from (36.8) that \(g^2 = \tau^{-1} \circ h^2 \circ \tau\) holds.
In fact, if you like proofs by induction, you won’t have trouble showing that
is valid for all \(n\).
What does this tell us?
It tells us that the following are equivalent
iterate \(n\) times with \(g\), starting at \(x\)
shift \(x\) to \(Y\) using \(\tau\), iterate \(n\) times with \(h\) starting at \(\tau(x)\), and shift the result \(h^n(\tau(x))\) back to \(X\) using \(\tau^{-1}\)
We end up with exactly the same object.
36.3.2. Back to Economics#
Have you guessed where this is leading?
What we’re going to show now is that the operators \(T\) and \(K\) commute under a certain bijection.
The implication is that they have exactly the same rate of convergence.
To make life a little easier, we’ll assume in the following analysis (although not always in our applications) that \(u(0) = 0\).
36.3.2.1. A Bijection#
Let \(\mathscr V\) be all strictly concave, continuously differentiable functions \(v\) mapping \(\mathbb R_+\) to itself and satisfying \(v(0) = 0\) and \(v'(y) > u'(y)\) for all positive \(y\).
For \(v \in \mathscr V\) let
Although we omit details, \(\sigma := M v\) is actually the unique \(v\)-greedy policy.
See proposition 12.1.18 of EDTC
It turns out that \(M\) is a bijection from \(\mathscr V\) to \(\mathscr P\).
A (solved) exercise below asks you to confirm this.
36.3.2.2. Commutative Operators#
It is an additional solved exercise (see below) to show that \(T\) and \(K\) commute under \(M\), in the sense that
In view of the preceding discussion, this implies that
Hence, \(T\) and \(K\) converge at exactly the same rate!
36.4. Implementation#
We’ve just shown that the operators \(T\) and \(K\) have the same rate of convergence.
However, it turns out that, once numerical approximation is taken into account, significant differences arises.
In particular, the image of policy functions under \(K\) can be calculated faster and with greater accuracy than the image of value functions under \(T\).
Our intuition for this result is that
the Coleman operator exploits more information because it uses first order and envelope conditions
policy functions generally have less curvature than value functions, and hence admit more accurate approximations based on grid point information
36.4.1. The Operator#
Here’s some code that implements the Coleman operator.
using Pkg; pkgs = ["BenchmarkTools", "Interpolations", "LaTeXStrings", "Optim", "Plots", "Roots"]; all(haskey.(Ref(Pkg.project().dependencies), pkgs)) || Pkg.add(pkgs)
using LinearAlgebra, Statistics
using BenchmarkTools, Interpolations, LaTeXStrings, Plots, Roots
using Optim, Random
using BenchmarkTools, Interpolations, Plots, Roots
function K!(Kg, g, grid, beta, dudc, f, f_prime, shocks)
# This function requires the container of the output value as argument Kg
# Construct linear interpolation object
g_func = LinearInterpolation(grid, g, extrapolation_bc = Line())
# solve for updated consumption value
for (i, y) in enumerate(grid)
function h(c)
vals = dudc.(g_func.(f(y - c) * shocks)) .* f_prime(y - c) .* shocks
return dudc(c) - beta * mean(vals)
end
Kg[i] = find_zero(h, (1e-10, y - 1e-10))
end
return Kg
end
# The following function does NOT require the container of the output value as argument
function K(g, grid, beta, dudc, f, f_prime, shocks)
K!(similar(g), g, grid, beta, dudc, f, f_prime, shocks)
end
K (generic function with 1 method)
It has some similarities to the code for the Bellman operator in our optimal growth lecture.
For example, it evaluates integrals by Monte Carlo and approximates functions using linear interpolation.
Here’s that Bellman operator code again, which needs to be executed because we’ll use it in some tests below
using Optim
function T(w, grid, beta, u, f, shocks, Tw = similar(w);
compute_policy = false)
# apply linear interpolation to w
w_func = LinearInterpolation(grid, w, extrapolation_bc = Line())
if compute_policy
sigma = similar(w)
end
# set Tw[i] = max_c { u(c) + beta E w(f(y - c) z)}
for (i, y) in enumerate(grid)
objective(c) = u(c) + beta * mean(w_func.(f(y - c) .* shocks))
res = maximize(objective, 1e-10, y)
if compute_policy
sigma[i] = Optim.maximizer(res)
end
Tw[i] = Optim.maximum(res)
end
if compute_policy
return Tw, sigma
else
return Tw
end
end
T (generic function with 2 methods)
36.4.2. Testing on the Log / Cobb–Douglas case#
As we did for value function iteration, let’s start by testing our method in the presence of a model that does have an analytical solution.
Here’s an object containing data from the log-linear growth model we used in the value function iteration lecture
isoelastic(c, gamma) = isone(gamma) ? log(c) : (c^(1 - gamma) - 1) / (1 - gamma)
function Model(; alpha = 0.65, # Productivity parameter
beta = 0.95, # Discount factor
gamma = 1.0, # Risk aversion
mu = 0.0, # First parameter in lognorm(mu, sigma)
s = 0.1, # Second parameter in lognorm(mu, sigma)
grid = range(1e-6, 4, length = 200), # Grid
grid_min = 1e-6, # Smallest grid point
grid_max = 4.0, # Largest grid point
grid_size = 200, # Number of grid points
u = (c, gamma = gamma) -> isoelastic(c, gamma), # utility function
dudc = c -> c^(-gamma), # u_prime
f = k -> k^alpha, # production function
f_prime = k -> alpha * k^(alpha - 1))
return (; alpha, beta, gamma, mu, s, grid, grid_min, grid_max, grid_size, u,
dudc, f, f_prime)
end
Model (generic function with 1 method)
Next we generate an instance
m = Model();
We also need some shock draws for Monte Carlo integration
using Random
Random.seed!(42) # for reproducible results.
shock_size = 250 # number of shock draws in Monte Carlo integral
shocks = collect(exp.(m.mu .+ m.s * randn(shock_size))); # generate shocks
As a preliminary test, let’s see if \(K c^* = c^*\), as implied by the theory
function verify_true_policy(m, shocks, c_star)
# compute (Kc_star)
(; grid, beta, dudc, f, f_prime) = m
c_star_new = K(c_star, grid, beta, dudc, f, f_prime, shocks)
# plot c_star and Kc_star
plot(grid, c_star, label = L"optimal policy $c^*$")
plot!(grid, c_star_new, label = L"Kc^*")
plot!(legend = :topleft)
end
verify_true_policy (generic function with 1 method)
c_star = (1 - m.alpha * m.beta) * m.grid # true policy (c_star)
verify_true_policy(m, shocks, c_star)

We can’t really distinguish the two plots, so we are looking good, at least for this test.
Next let’s try iterating from an arbitrary initial condition and see if we converge towards \(c^*\).
The initial condition we’ll use is the one that eats the whole pie: \(c(y) = y\)
function check_convergence(m, shocks, c_star, g_init; n_iter = 15)
(; grid, beta, dudc, f, f_prime) = m
g = g_init
plot(m.grid, g, lw = 2, alpha = 0.6, label = L"intial condition $c(y) = y$")
for i in 1:n_iter
new_g = K(g, grid, beta, dudc, f, f_prime, shocks)
g = new_g
plot!(grid, g, lw = 2, alpha = 0.6, label = "")
end
plot!(grid, c_star, color = :black, lw = 2, alpha = 0.8,
label = L"true policy function $c^*$")
plot!(legend = :topleft)
end
check_convergence (generic function with 1 method)
check_convergence(m, shocks, c_star, m.grid, n_iter = 15)

We see that the policy has converged nicely, in only a few steps.
Now let’s compare the accuracy of iteration using the Coleman and Bellman operators.
We’ll generate
\(K^n c\) where \(c(y) = y\)
\((M \circ T^n \circ M^{-1}) c\) where \(c(y) = y\)
In each case we’ll compare the resulting policy to \(c^*\).
The theory on equivalent dynamics says we will get the same policy function and hence the same errors.
But in fact we expect the first method to be more accurate for reasons discussed above
function iterate_updating(func, arg_init; sim_length = 20)
arg = arg_init
for i in 1:sim_length
new_arg = func(arg)
arg = new_arg
end
return arg
end
function compare_error(m, shocks, g_init, w_init; sim_length = 20)
(; grid, beta, u, dudc, f, f_prime) = m
g, w = g_init, w_init
# two functions for simplification
bellman_single_arg(w) = T(w, grid, beta, u, f, shocks)
coleman_single_arg(g) = K(g, grid, beta, dudc, f, f_prime, shocks)
g = iterate_updating(coleman_single_arg, g_init, sim_length = 20)
w = iterate_updating(bellman_single_arg, w_init, sim_length = 20)
new_w, vf_g = T(w, grid, beta, u, f, shocks, compute_policy = true)
pf_error = c_star - g
vf_error = c_star - vf_g
plot(grid, zero(grid), color = :black, lw = 1, label = "")
plot!(grid, pf_error, lw = 2, alpha = 0.6, label = "policy iteration error")
plot!(grid, vf_error, lw = 2, alpha = 0.6, label = "value iteration error")
plot!(legend = :bottomleft)
end
compare_error (generic function with 1 method)
compare_error(m, shocks, m.grid, m.u.(m.grid), sim_length = 20)

As you can see, time iteration is much more accurate for a given number of iterations.
36.5. Exercises#
36.5.1. Exercise 1#
Show that (36.9) is valid. In particular,
Let \(v\) be strictly concave and continuously differentiable on \((0, \infty)\)
Fix \(y \in (0, \infty)\) and show that \(MTv(y) = KMv(y)\)
36.5.2. Exercise 2#
Show that \(M\) is a bijection from \(\mathscr V\) to \(\mathscr P\).
36.5.3. Exercise 3#
Consider the same model as above but with the CRRA utility function
Iterate 20 times with Bellman iteration and Euler equation time iteration
start time iteration from \(c(y) = y\)
start value function iteration from \(v(y) = u(y)\)
set \(\gamma = 1.5\)
Compare the resulting policies and check that they are close.
36.5.4. Exercise 4#
Do the same exercise, but now, rather than plotting results, benchmark both approaches with 20 iterations.
36.6. Solutions#
36.6.1. Solution to Exercise 1#
Let \(T, K, M, v\) and \(y\) be as stated in the exercise.
Using the envelope theorem, one can show that \((Tv)'(y) = u'(c(y))\) where \(c(y)\) solves
Hence \(MTv(y) = (u')^{-1} (u'(c(y))) = c(y)\).
On the other hand, \(KMv(y)\) is the \(c(y)\) that solves
We see that \(c(y)\) is the same in each case.
36.6.2. Solution to Exercise 2#
We need to show that \(M\) is a bijection from \(\mathscr V\) to \(\mathscr P\).
To see this, first observe that, in view of our assumptions above, \(u'\) is a strictly decreasing continuous bijection from \((0,\infty)\) to itself.
It follows that \(h\) has the same properties.
Moreover, for fixed \(v \in \mathscr V\), the derivative \(v'\) is a continuous, strictly decreasing function.
Hence, for fixed \(v \in \mathscr V\), the map \(M v = h \circ v'\) is strictly increasing and continuous, taking values in \((0, \infty)\).
Moreover, interiority holds because \(v'\) strictly dominates \(u'\), implying that
In particular, \(\sigma(y) := (Mv)(y)\) is an element of \(\mathscr P\).
To see that each \(\sigma \in \mathscr P\) has a preimage \(v \in \mathscr V\) with \(Mv = \sigma\), fix any \(\sigma \in \mathscr P\).
Let \(v(y) := \int_0^y u'(\sigma(x)) dx\) with \(v(0) = 0\).
With a small amount of effort you will be able to show that \(v \in \mathscr V\) and \(Mv = \sigma\).
It’s also true that \(M\) is one-to-one on \(\mathscr V\).
To see this, suppose that \(v\) and \(w\) are elements of \(\mathscr V\) satisfying \(Mv = Mw\).
Then \(v(0) = w(0) = 0\) and \(v' = w'\) on \((0, \infty)\).
The fundamental theorem of calculus then implies that \(v = w\) on \(\mathbb R_+\).
36.6.3. Solution to Exercise 3#
Here’s the code, which will execute if you’ve run all the code above
# Model instance with risk aversion = 1.5
# others are the same as the previous instance
m_ex = Model(gamma = 1.5);
function exercise2(m, shocks, g_init = m.grid, w_init = m.u.(m.grid);
sim_length = 20)
(; grid, beta, u, dudc, f, f_prime) = m
# initial policy and value
g, w = g_init, w_init
# iteration
bellman_single_arg(w) = T(w, grid, beta, u, f, shocks)
coleman_single_arg(g) = K(g, grid, beta, dudc, f, f_prime, shocks)
g = iterate_updating(coleman_single_arg, g_init, sim_length = 20)
w = iterate_updating(bellman_single_arg, w_init, sim_length = 20)
new_w, vf_g = T(w, grid, beta, u, f, shocks, compute_policy = true)
plot(grid, g, lw = 2, alpha = 0.6, label = "policy iteration")
plot!(grid, vf_g, lw = 2, alpha = 0.6, label = "value iteration")
return plot!(legend = :topleft)
end
exercise2 (generic function with 3 methods)
exercise2(m_ex, shocks, m.grid, m.u.(m.grid), sim_length = 20)

The policies are indeed close.
36.6.4. Solution to Exercise 4#
Here’s the code.
It assumes that you’ve just run the code from the previous exercise
function bellman(m, shocks)
(; grid, beta, u, dudc, f, f_prime) = m
bellman_single_arg(w) = T(w, grid, beta, u, f, shocks)
iterate_updating(bellman_single_arg, u.(grid), sim_length = 20)
end
function coleman(m, shocks)
(; grid, beta, dudc, f, f_prime) = m
coleman_single_arg(g) = K(g, grid, beta, dudc, f, f_prime, shocks)
iterate_updating(coleman_single_arg, grid, sim_length = 20)
end
coleman (generic function with 1 method)
@benchmark bellman(m_ex, shocks)
BenchmarkTools.Trial: 11 samples with 1 evaluation per sample.
Range (min … max): 448.348 ms … 512.397 ms ┊ GC (min … max): 1.61% … 6.33%
Time (median): 450.542 ms ┊ GC (median): 2.08%
Time (mean ± σ): 460.860 ms ± 19.597 ms ┊ GC (mean ± σ): 2.51% ± 1.33%
▃█▃
███▁▁▁▁▁▁▁▁▁▁▁▁▇▁▇▁▁▁▁▁▁▁▁▁▇▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▇ ▁
448 ms Histogram: frequency by time 512 ms <
Memory estimate: 142.09 MiB, allocs estimate: 152002.
@benchmark coleman(m_ex, shocks)
BenchmarkTools.Trial: 2 samples with 1 evaluation per sample.
Range (min … max): 2.465 s … 2.562 s ┊ GC (min … max): 2.46% … 2.48%
Time (median): 2.514 s ┊ GC (median): 2.47%
Time (mean ± σ): 2.514 s ± 68.123 ms ┊ GC (mean ± σ): 2.47% ± 0.01%
█ █
█▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁▁█ ▁
2.47 s Histogram: frequency by time 2.56 s <
Memory estimate: 922.71 MiB, allocs estimate: 937719.